In a normal search problem, the optimal solution would be a sequence of actions leading to a goal state-a terminal state that is a win. In adversarial search, MIN has something to say about it. MAX therefore must find a contingent strategy, which specifies MAX’s move in the initial state, then MAX’s moves in the states resulting from every possible response by

MIN, then MAX’s moves in the states resulting from every possible response by MIN to those moves, and so on. This is exactly analogous to the AND-OR search algorithm (Figure 4.1 1) with MAX playing the role of OR and MIN equivalent to AND. Roughly speaking, an optimal strategy leads to outcomes at least as good as any other strategy when one is playing an infallible opponent. We begin by showing how to find this optimal strategy.
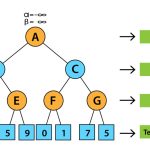
Even a simple game like tic-tac-toe is too complex for us to draw the entire game tree on one page, so we will switch to the trivial game in Figure 5.2. The possible moves for MAX at the root node are labeled a1, a2, and a3. The possible replies to a1 for MIN are b1, l>2, bs, and so on. This particular game ends after one move each by MAX and MIN. (In game parlance, we say that this tree is one move deep, consisting of two half-moves, each of which is called a ply.) The utilities of the terminal states in this game range from 2 to 14.
Given a game tree, the optimal strategy can he cleterrninecl from the minimax value of each node, which we write as MINIMAX(n). The minimax value of a node is the utility (for MAX) of being in the corresponding state, assuming that both players play optimally from there to the end of the game. Obviously, the minimax value of a terminal state is just its utility. Furthermore, given a choice, MAX prefers to move to a state of maximum value, whereas MIN prefers a state of minimwn value. So we have the following:

Let us apply these definitions to the game tree in Figure 5.2. The terminal nodes on the bottom level get their utility values from the game’s UTILITY function. The first MIN node, labeled B, has three successor states with values 3, 12, and 8, so its minimax value is 3. Similarly, the other two MIN nodes have minimax value 2. The root node is a MAX node; its successor states have minimax values 3, 2, and 2; so it has a minimax value of 3. We can also identify the minimax decision at the root: action a1 is the optimal choice for MAX because it leads to the state with the highest minimax value.
This definition of optimal play for MAX assumes that MIN also plays optimally-it maximizes the worst-case outcome for MAX. What if Mil\ does not play optimally? Then it is easy to show (Exercise 5.7) that MAX will do even better. Other strategies against suboptimal opponents may do better than the minimax strategy, but these strategies necessarily do worse against optimal opponents.

Comments are closed