There are far too many powerful search algorithms out there to fit in a single article. Instead, this article will discuss six of the fundamental search algorithms, divided into two categories, as shown below.

Note that there is much more to search algorithms that the chart I have provided above. However, this article will mostly stick to the above chart, exploring the algorithms given there.
Uninformed Search Algorithms
The search algorithms in this section have no additional information on the goal node other than the one provided in the problem definition. The plans to reach the goal state from the start state differ only by the order and/or length of actions. Uninformed search is also called Blind search.
The following uninformed search algorithms are discussed in this section.
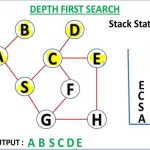
1. Depth First Search
2. Breath First Search
3. Uniform Cost Search
Each of these algorithms will have:
· A problem graph, containing the start node S and the goal node G.
· A strategy, describing the manner in which the graph will be traversed to get to G .
· A fringe, which is a data structure used to store all the possible states (nodes) that you can go from the current states.
· A tree, that results while traversing to the goal node.
· A solution plan, which the sequence of nodes from S to G.