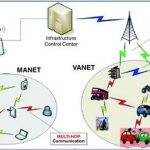
Vehicular Ad hoc Network (VANET), a subclass of mobile Ad Hoc networks (MANETs), is a promising approach for future intelligent transportation system (ITS). These networks have no fixed infrastructure and instead rely on the vehicles themselves to provide netw ork functionality. However, due to mobility constraints, driver behavior, and high mobility, VANETs exhibit characteristics that are dramatically different from many generic MANETs.
Networking Properties of VANET
VANETs are an instantiation of a Mobile Ad Hoc networks (MANETs). MANETs have no fixed infrastructure and instead rely on ordinary nodes to perform routing of messages and network management functions. However, Vehicular Ad Hoc networks behave in fundamentally different ways than the models that predominate MANET research. Driver behavior, constraints on mobility, and high speeds create unique Characteristics in IVC networks. These characteristics have important implications for design decisions in these networks. The major differences are as follows. a) Rapid changes in the VANETs topology are difficult to manage. Due to high relative speed between cars network’s topology changes very fast. b) The IVC network is subject to frequent fragmentation, even at a high rate of IVC deployment. Although the connectivity characteristic of MANETs has been studied broadly, there is few research which tries to tackle this problem. It is mostly because VANET’s connectivity depends on the scenario. Of course being connective for VANETs is not important for emergency safety messages since while the network is not connected there is no problem in safety point of view. c) The IVC network has small effective network diameter. Rapid changes in connectivity cause many pas to disconnect before they can be utilized.
This characteristic is important for mostly comfort application as they need to establish unicast and multicast routes (e.g., to the internet gateway). d) No significant power constraints, unlike sensor and other types of mobile networks where limited battery life is a major concern. Potentially large-scale: In a city center or highways at the entrance of big cities the network could be quite large scale. Variable Network density: the network’s density depends on vehicular density which is highly variable. In traffic jam situations the network can be categorized in very dense networks in suburban traffics it could be a sparse network. g) The topology of the network could be affected by driver’s behavior due to his/her reaction to the messages. In other words the content of messages can change net-work’s topology.
Safety Applications
Examples of vehicle-to-vehicle safety communication may include collision waning, road obstacle warning, cooperative driving, intersection collision warning, and lane change assistance. There are two types of safety messages in the control channel (e.g., of DSRC) and can be classified depending on how they are generated: event driven and periodic. The first ones are the result of the detection of an unsafe situation, (eg., a car crash, the proximity of vehicles at high speed, etc). Periodic messages instead can be seen as preventive messages in terms of safety, and their information can also be used by other (non-safety) applications (e.g., traffic monitoring) or protocols (e.g., routing).
Periodic message exchange (also called beaconing) is needed to make vehicles aware of their environment. Thus, they will be able to avoid emergency or unsafe situations even before they appear. Therefore beacon messages essentially contain the stat of the sending vehicle, i.e., position, direction, speed, etc., and also aggregated data regarding the state of their neighbors. It is reasonable to assume that these periodic messages will be sent in a broadcast fashion since the messages’ content can be beneficial for all vehicles around. In the following we come to debate the previous related works attempting to providing safety applications. MAC Layer
Issues.: As mentioned before, event driven messages should have higher priority than periodic and comfort messages. Thus some mechanisms for service differentiation and admission control are needed. In the other words, we could define the levels of priority. event driven safety messages, beacon safety messages and comfort messages, in decreasing order.
These mechanisms are highly depended on MAC layer policy. Therefore in the first step the research and industry should standardized a standard for MAC layer in VANETs. There are some promising MAC techniques for future VANETs . Currently IEEE 802.1 la is chosen by ASTM (American Society for Testing and Materials) to be basis for its standard of DSRC and IEEE P 1609 Working Group is proposing DSRC as IEEE 802.11p standard .
However MAC layers based on UTRA TDD , promoted by CarTALK can be another alternative. Also still some efforts are running on Time Division Multiple Access (TDMA). Message Dissemination: Due to specific characteristics of safety messages, broadcasting could be the only possible way for message exchange. So it could be possible to get complete coverage to all relevant vehicles. Message forwarding can help warning message reach vehicles beyond the radio transmission.